

Proposed Thesis: Online System Identification in Adversarial Model-Based Planning
- Develop a framework for planning under uncertainty against adversarial agents with unknown parameters (e.g., pursuit algorithms, maneuverability).
- Integrate Expected Information Gain (EIG) into the cost function of trajectory optimization algorithms (MPPI, MPC, MBD) to promote active learning
- Leads to control policies that "excite" the system to safely learn adversarial agent models while preserving mission objectives
- Validate framework effectiveness in a high-fidelity, 6-DOF F-16 Dogfighting Environment
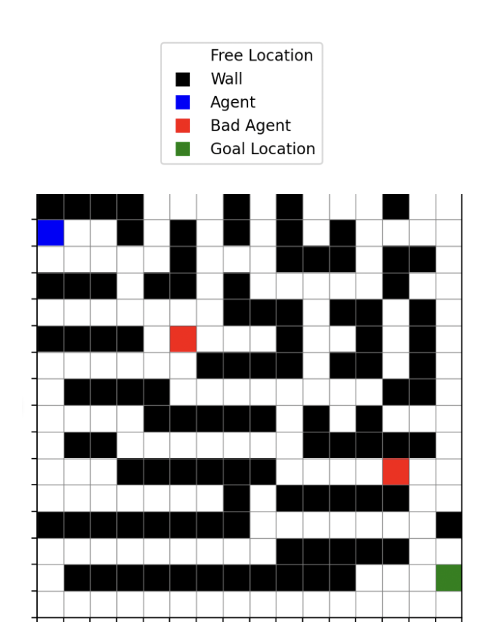
Learning to Navigate: An Imitation Learning Framework for Path Planning in Adversarial Environments
- Developed a Transfer and Curriculum Learning Framework to train a robust navigation policy for adversarial environments
- Pretrained an agent on expert demonstrations in a static maze using DAGGER and Behavior Cloning
- Fine-tuned the policy for dynamic adversarial scenarios using Proximal Policy Optimization (PPO)
- Achieved significant performance improvements over a baseline PPO policy in the adversarial environments
- Link to full paper here
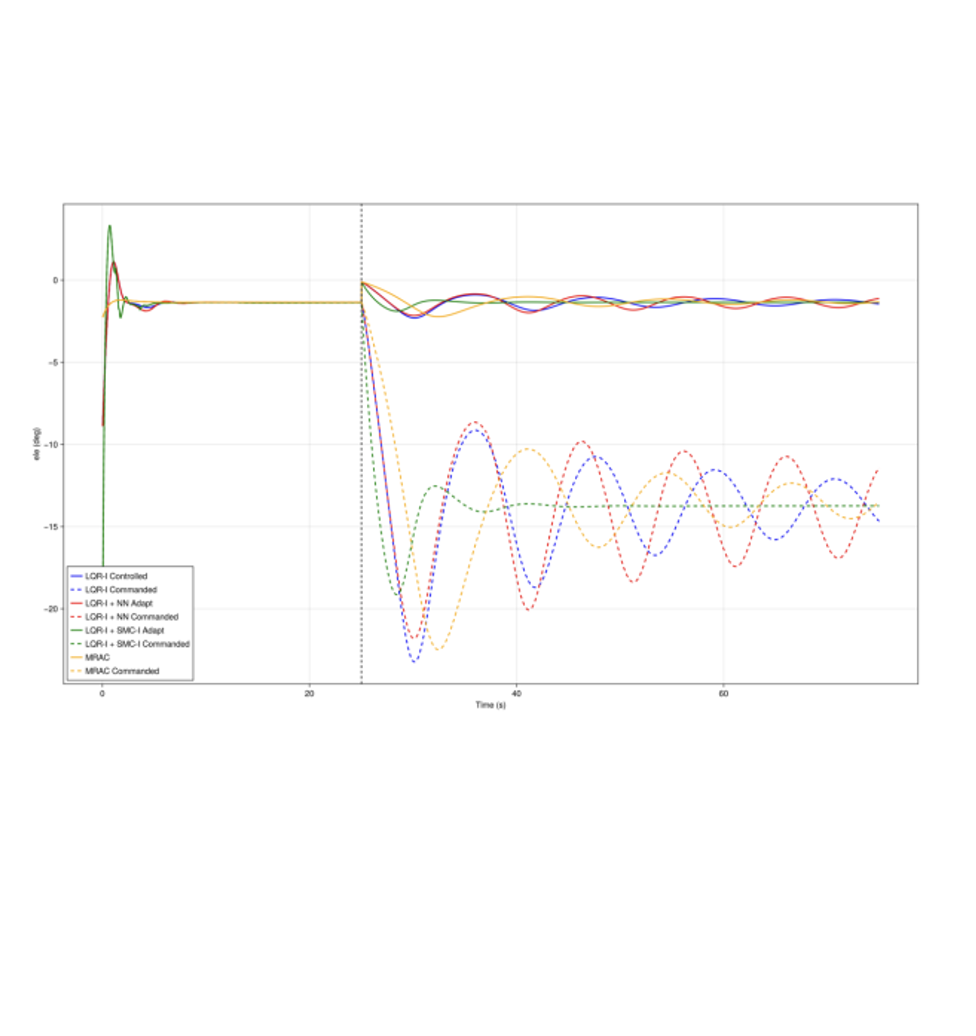
Adaptive Control For F-16 Catastrophic Loss of Effectiveness
- Implemented and compared non-linear adaptive control methods, including MRAC, Sliding Mode, and NN based approaches
- Evaluated controller performance of each method on an F-16's ability to hold a trim condition with loss of elevator effectiveness
- Link to full paper here
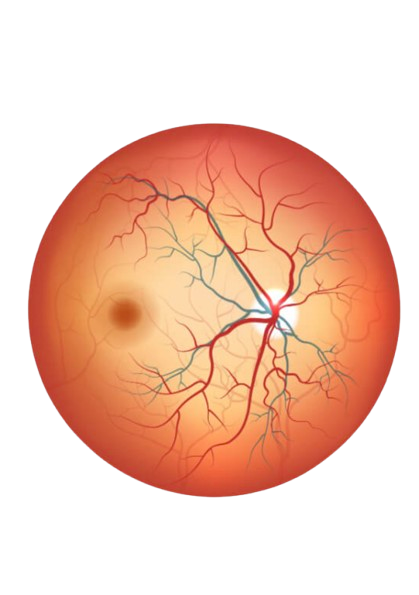
Fundus Image Classification for Retinal Disease Detection
- Performed Image Classification task on retinal images for automated disease detection
- Engineered featured from pre-processed image data using Histogram of Oriented Gradients (HOG)
- Implemented and benchmarked different ML architectures, including SVM, CNN's and YOLOv8 on classification accuracy
- Link to full paper here
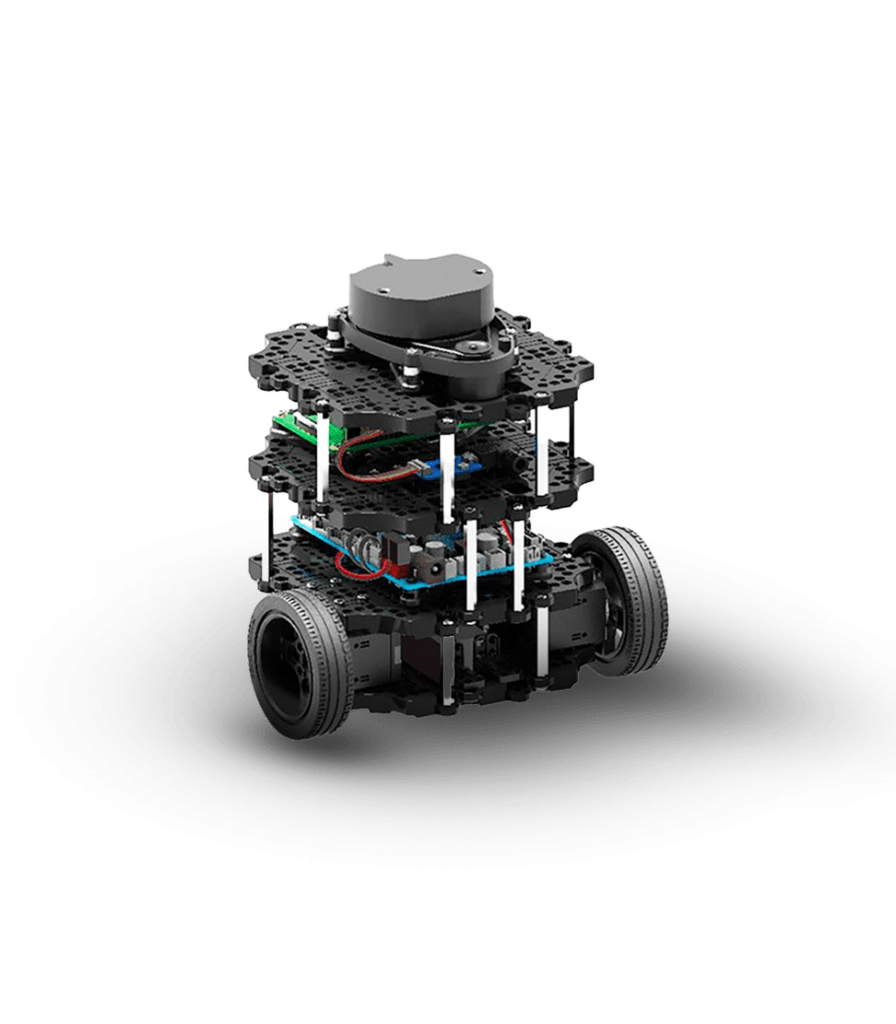
TurtleBot Path Planning
- Fused TurtleBot Sensor Readings (LIDAR, Camera, Odometry, etc.) for state estimation in a maze environment
- Implemented navigation and control algorithms for autonomous maze traversal
- Fine-tuned a ResNet Image Classifier on few-shot learning on navigational signs to inform path decisions
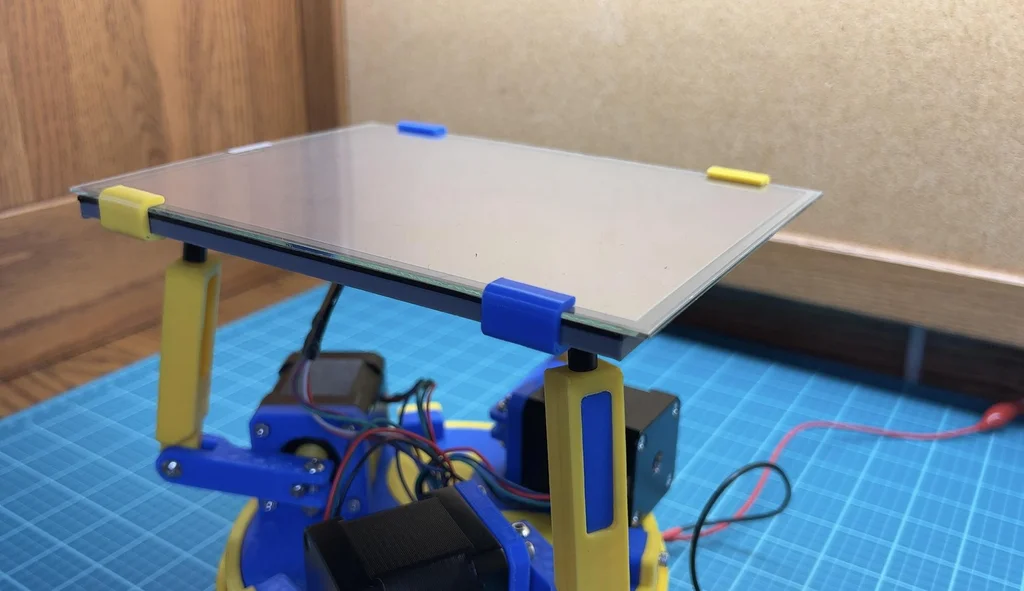
Ball Balancing Robot
- Modeled and fabricated a robot consisting of 3D printed parts and heated inserts
- Interfaced Arduino with three stepper motors and a resistive touch pad to determine ball’s location
- Utilized inverse kinematics to determine how motor movement would impact platform orientation
- Implemented a C++ based PID controller to balance a ball, using a resistive touch pad for orientation feedback and the motors for corrective action
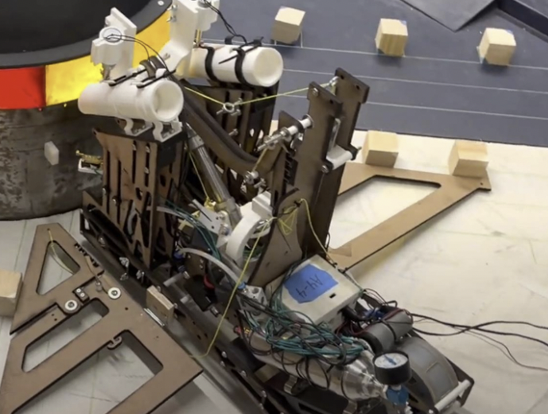
Competition Robot
- Designed and modeled the robot in SolidWorks
- Fabricated the robot using Laser Cutters, Water Jets, and 3D Printers
- Wrote scripts in C++ integrating sensors, pneumatics, solenoids, and motors
- Competed against 64 other teams, placing in the top 5
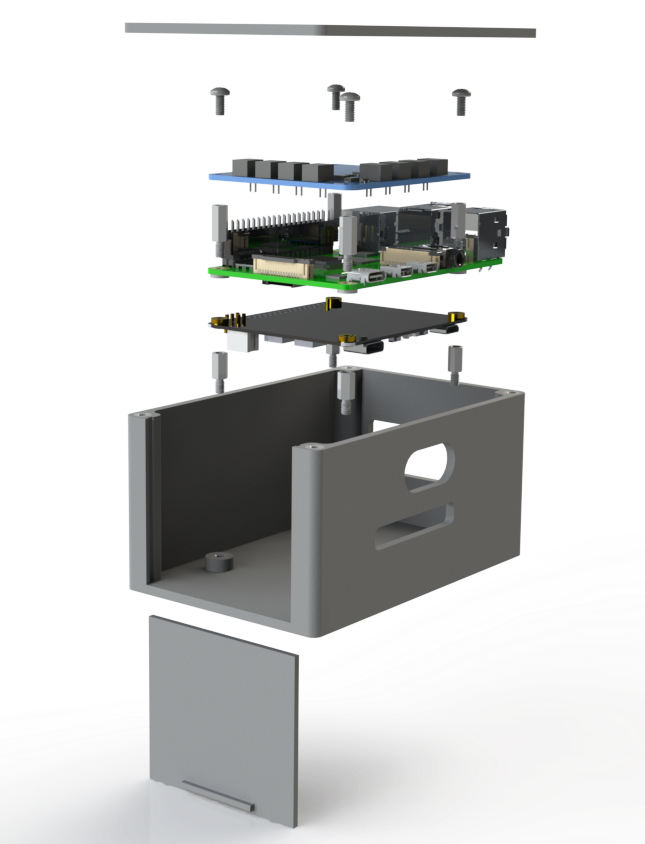
Electronics Enclosure
- Designed and modeled a compact electronics enclosure in CAD for integration with a lower-body exoskeleton
- Fabricated the enclosure using 3D printers and heated inserts
- Tested the wearable enclosure to ensure reliability against vibrations and environmental stresses
Work Experience
GT Dynamic Adaptive Robotic Technologies (DART) Lab
- Graduate Research Assistant
- Path Planning / Trajectory Optimization
- Reinforcement Learning
- High Fidelity Adversarial Modeling
- Aircraft Modeling and Simulation
- Aug 2023 - Present
Sandia National Labs
- Aerial Autonomy Intern
- Multi-Agent, Adversarial Path Planning
- Sequential Modeling using Transformer Encoder architecture
- May 2025 - Present
Shield AI
- Mechanical Engineering Intern
- Redesigned and prototyped subsystem on a Group 5 UAS
- Utilized FEA and safety factors to assist in material selection
- Tested response to vibration, salt fog and cyclical loading
- Automated the visualization of post flight controls data
- May 2023 - Aug 2023
GT Exoskeleton and Prosthetic Intelligent Controls (EPIC) Lab
- Undergraduate Research Assistant
- Developed enclosure for electronics, accounting for vibrations and stresses
- Integrated socket connection for sensor and input data to be transferred to the hip exoskeleton
- Assisted in live visualization of outputs and important metrics
- Aug 2021 - May 2023
Procter & Gamble
- Research and Development Intern
- Utilized PowerBI to visualize data, mockup enhancements and presented solutions for management
- Developed a Python script to automate a key data processing pipeline, resulting in a saving of hundreds of man-hours annually
- May 2022 - Aug 2022
Relevant Masters Coursework
- Deep Reinforcement Learning
- Deep Learning
- Machine Learning
- Linear Controls
- Non-Linear Controls
- Advanced Flight Dynamics
Contact Information
-
Email
cbossard3@gatech.edu -
Phone
(240) 778-4272 -
LinkedIn
https://www.linkedin.com/in/connor-bossard/ -
Resume